Bridge vers Omniverse / Isaac Sim
Envoyez des modèles 3D Meshy directement dans NVIDIA Omniverse ou Isaac Sim, avec, en option, la physique Sim-Ready et des étiquettes sémantiques appliquées lors de l’importation.
Avant d’utiliser Envoyer vers OV/Isaac, gardez Isaac Sim ou votre application Omniverse Kit en cours d’exécution, assurez-vous que l’extension Meshy Bridge est activée, puis ouvrez ou créez un stage USD.
Démarrer le Bridge
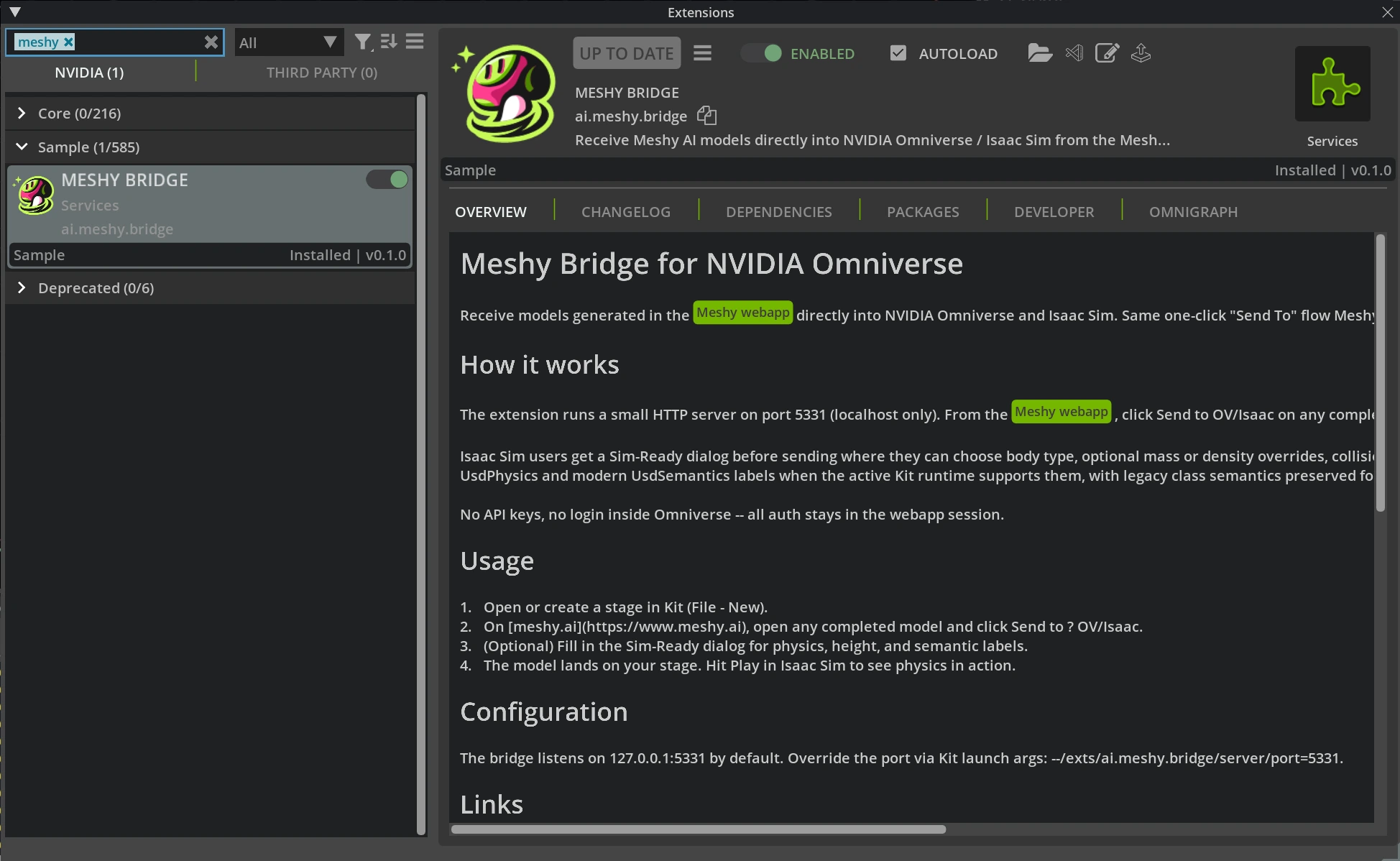
Dans la fenêtre Extensions, assurez-vous que Meshy Bridge est activé. Aucun lanceur séparé n’est requis.
Envoyer depuis Meshy
Ouvrez un modèle terminé dans votre espace de travail Meshy, cliquez sur le menu DCC Bridge, puis sélectionnez Envoyer vers OV/Isaac.

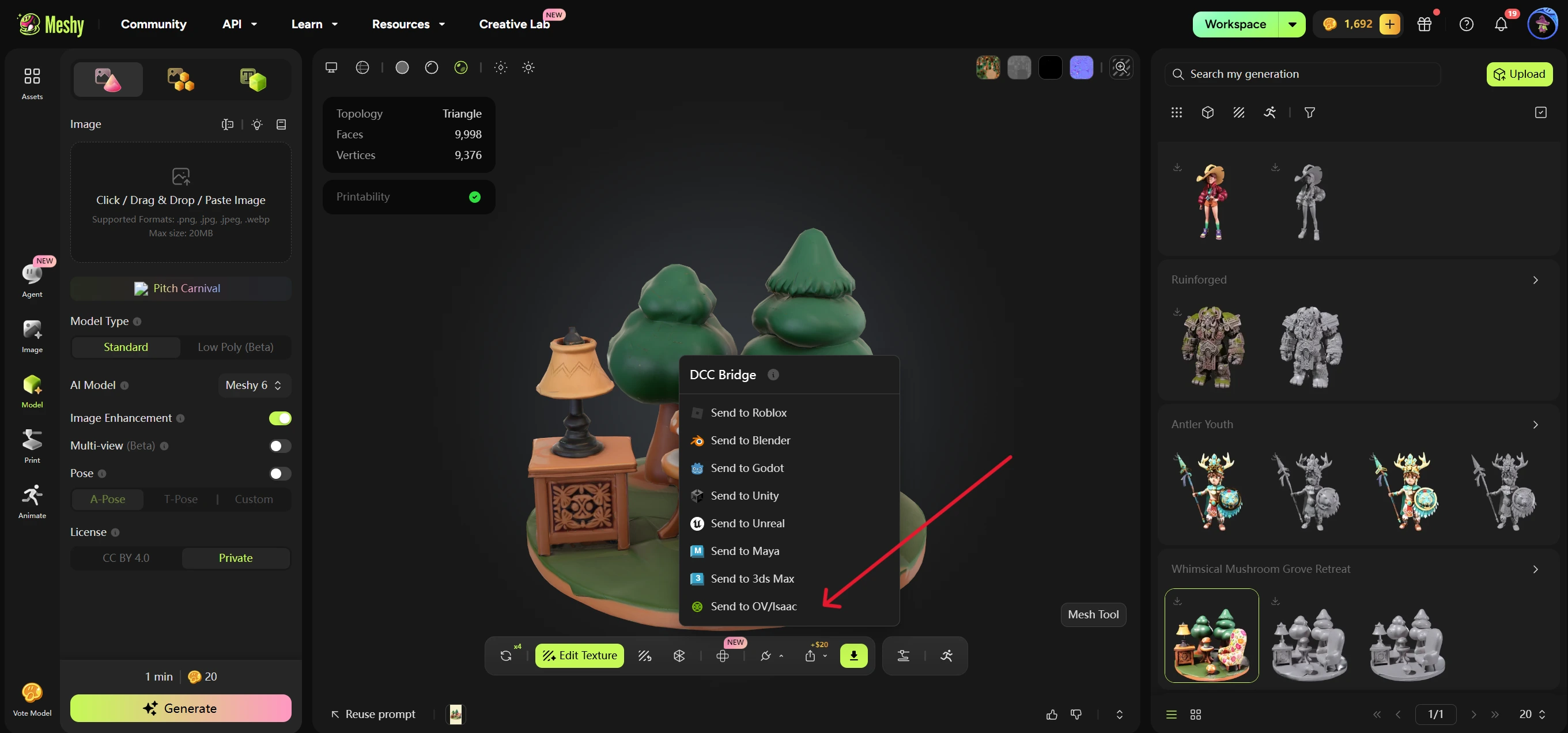
Meshy envoie l’URL du modèle, le format de fichier, le nom d’affichage et la charge utile Sim-Ready facultative au bridge local. L’extension télécharge l’asset, le convertit en USD si nécessaire et le référence sous /World/<slug>.
Configurer Sim-Ready
Les utilisateurs d’Isaac Sim peuvent configurer la boîte de dialogue Sim-Ready avant l’envoi :
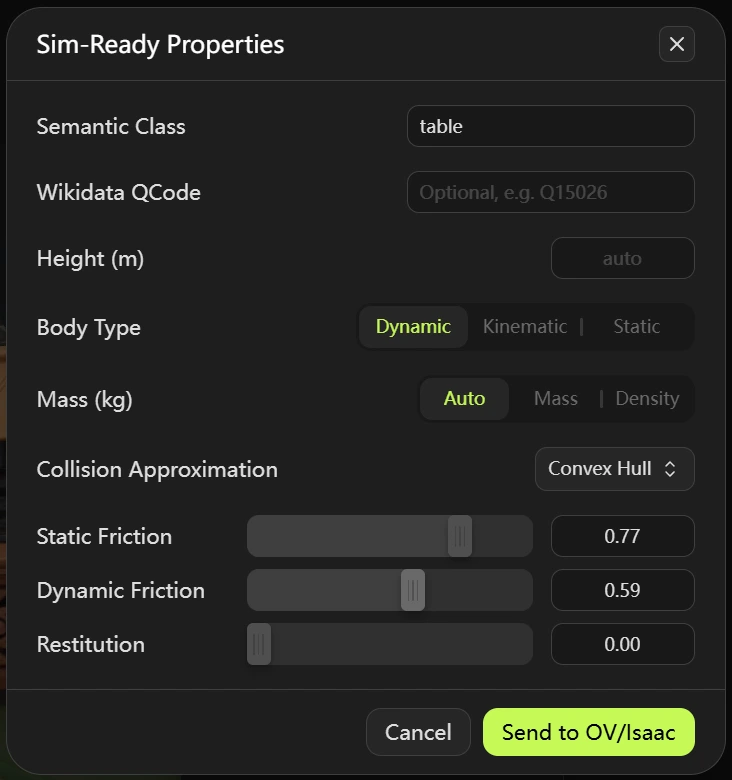
Semantic Class: une étiquette de classe simple commechair,tableourobot. Le bridge l’écrit via les étiquettes sémantiques modernes et conserve également la compatibilité LegacySemanticsAPI("class").Wikidata QCode: étiquette de taxonomie sémantique facultative, commeQ15026. Une valeur vide est autorisée ; les formats invalides sont rejetés avant l’envoi.Height (m): remplacement facultatif de la hauteur réelle. Une valeur vide conserve la mise à l’échelle de l’unité du calque source et du stage.Body Type:dynamic,kinematicoustatic.Mass: par défaut surAuto. Auto n’envoie nimassnidensity;Massenvoie des kilogrammes ;Densityenvoie des kg/m³.Collision Approximation:convexHull,convexDecomposition,meshSimplification,boundingCube,boundingSphereounone. SDF n’est pas pris en charge dans cette version. Les corps dynamiques n’autorisent queconvexHull,convexDecomposition,boundingCubeetboundingSphere.Static Friction,Dynamic FrictionetRestitution: valeurs de matériau physique liées aux colliders importés.
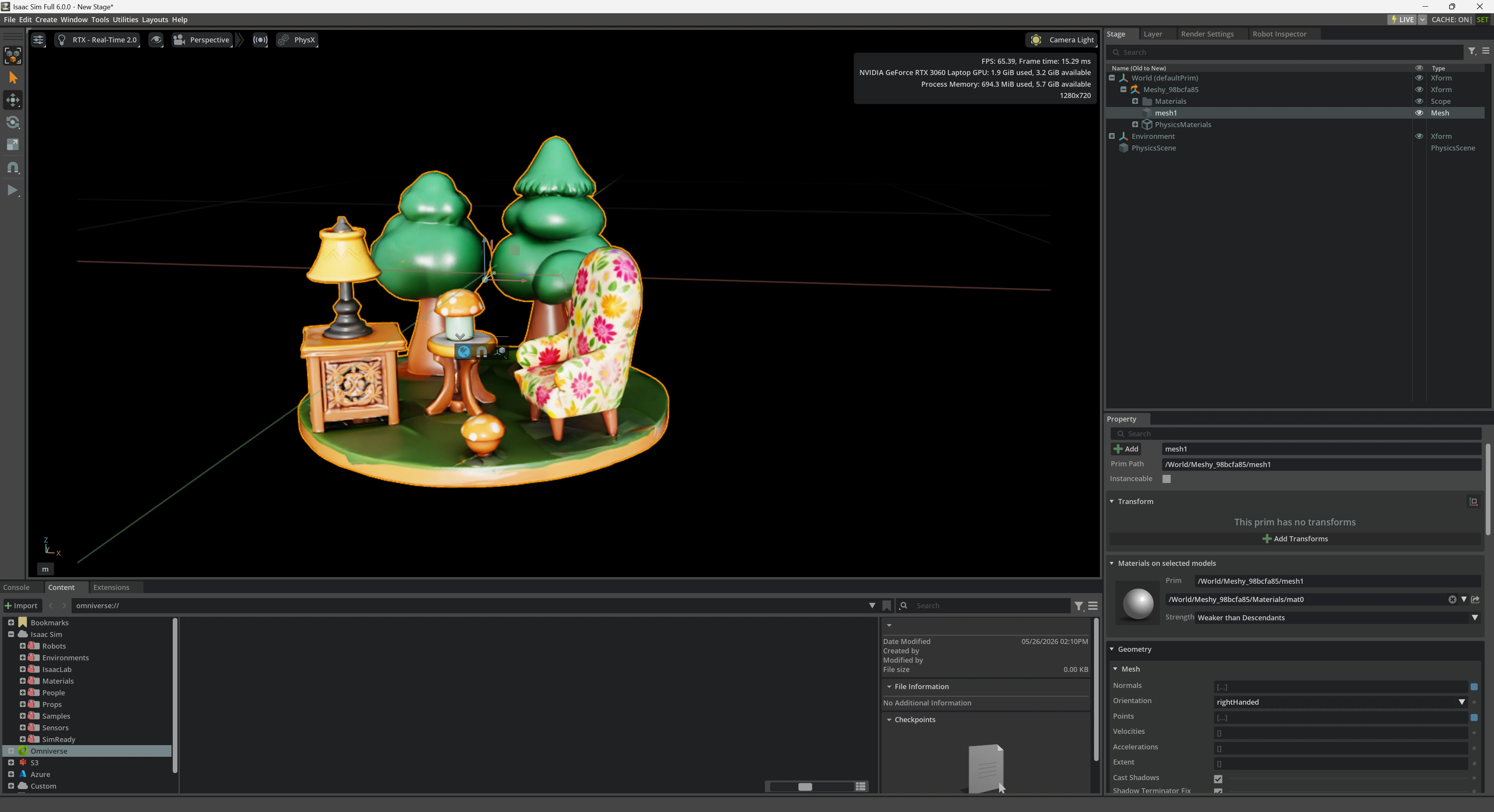
Vérifier l’importation
Une fois la requête réussie, le modèle apparaît dans le stage actif sous /World/<slug>. Pour les importations Sim-Ready, les maillages descendants reçoivent UsdPhysics.CollisionAPI et UsdPhysics.MeshCollisionAPI ; les enveloppes dynamiques et cinématiques reçoivent également UsdPhysics.RigidBodyAPI et UsdPhysics.MassAPI.
Appuyez sur Play dans Isaac Sim pour tester le comportement physique. Les corps dynamiques doivent être simulés, les corps statiques restent fixes, et les corps cinématiques peuvent être pilotés par une animation ou un script tout en participant aux collisions.
Dépannage
- Si Meshy ne peut pas se connecter, vérifiez qu’Isaac Sim ou Kit est en cours d’exécution et que l’extension est activée.
- Si
/statusne répond pas, vérifiez qu’aucun autre processus n’utilise le port5331, puis rechargez l’extension. - Si l’importation échoue avec
no active USD stage, créez ou ouvrez un stage avant l’envoi. - Si une importation dynamique rejette
noneoumeshSimplification, choisissez une approximation convexe ou englobante. - Si un QCode est rejeté, utilisez le format Wikidata
Qsuivi d’un entier non nul, par exempleQ15026.
Modèles pris en charge
Envoyer vers OV/Isaac prend en charge tous les types de modèles Meshy, y compris les modèles animés.