Bridge para Omniverse / Isaac Sim
Envie modelos 3D do Meshy diretamente para o NVIDIA Omniverse ou Isaac Sim, com física Sim-Ready opcional e rótulos semânticos aplicados durante a importação.
Antes de usar Enviar para OV/Isaac, mantenha o Isaac Sim ou seu aplicativo Omniverse Kit em execução, certifique-se de que a extensão Meshy Bridge esteja habilitada e abra ou crie um estágio USD.
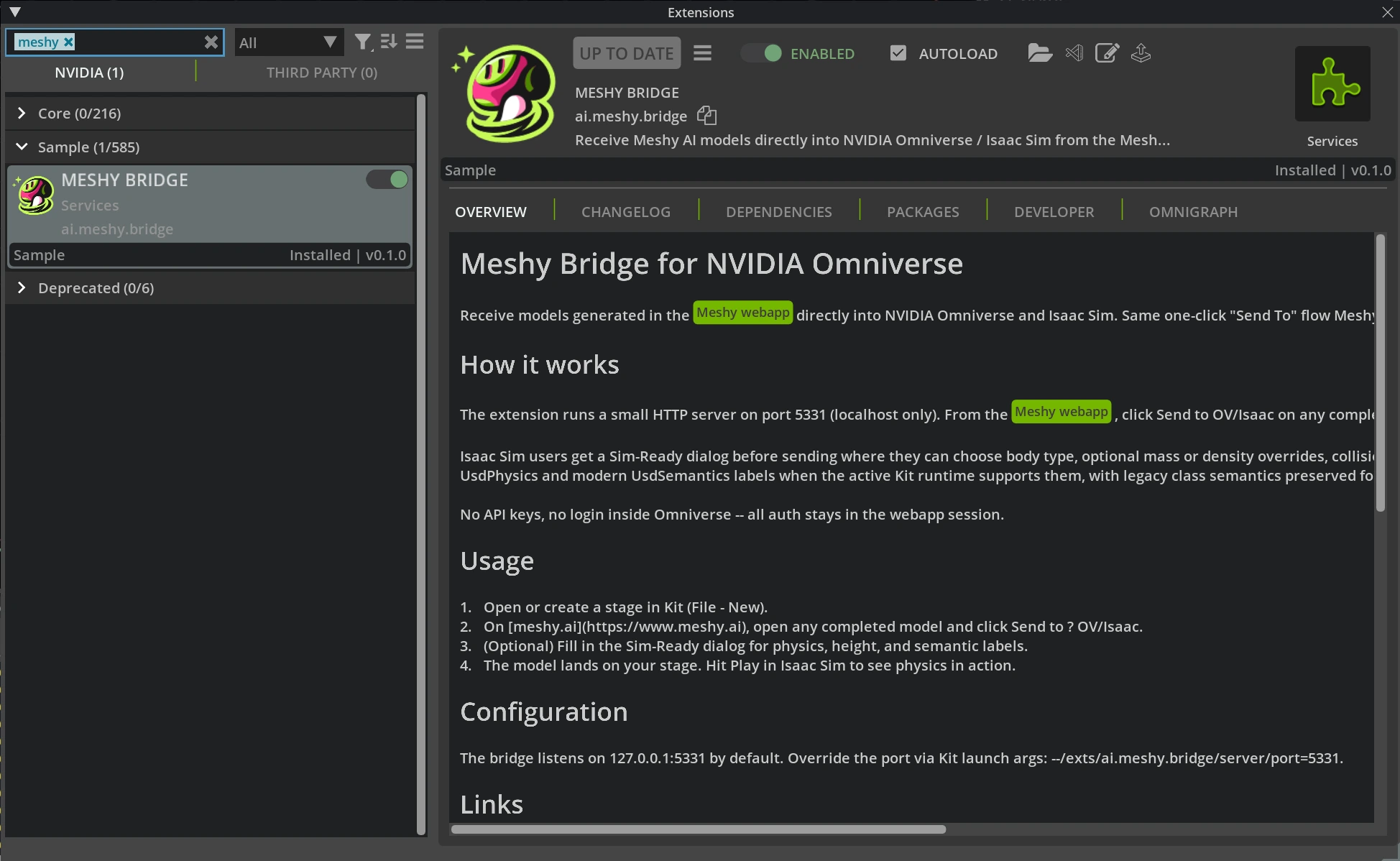
Iniciar o Bridge
Na janela Extensões, certifique-se de que Meshy Bridge esteja habilitado. Nenhum launcher separado é necessário.
Enviar a partir do Meshy
Abra um modelo concluído no seu espaço de trabalho do Meshy, clique no menu DCC Bridge e selecione Enviar para OV/Isaac.

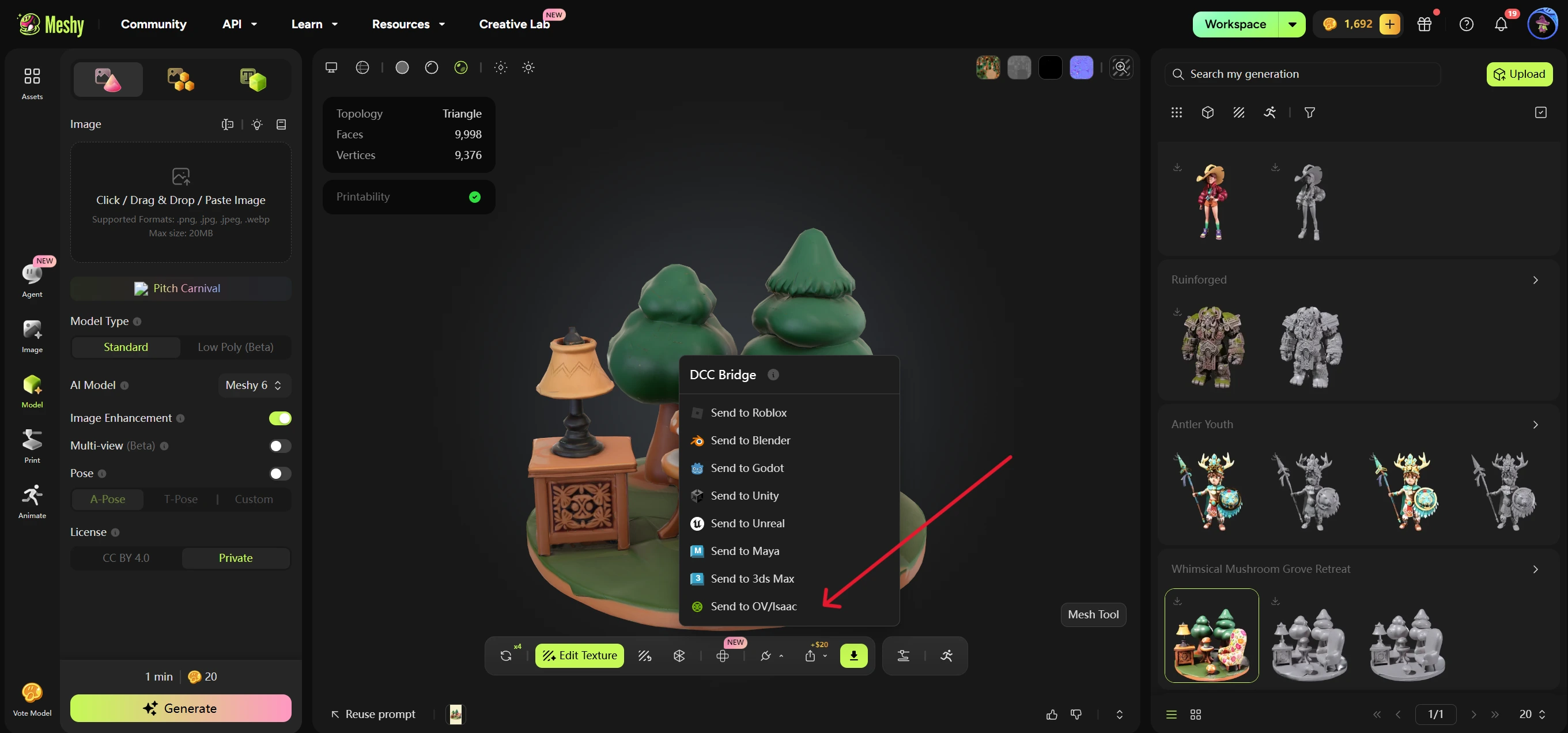
O Meshy envia a URL do modelo, o formato do arquivo, o nome de exibição e o payload Sim-Ready opcional para o bridge local. A extensão baixa o asset, converte-o para USD quando necessário e o referencia em /World/<slug>.
Configurar Sim-Ready
Usuários do Isaac Sim podem configurar a caixa de diálogo Sim-Ready antes de enviar:
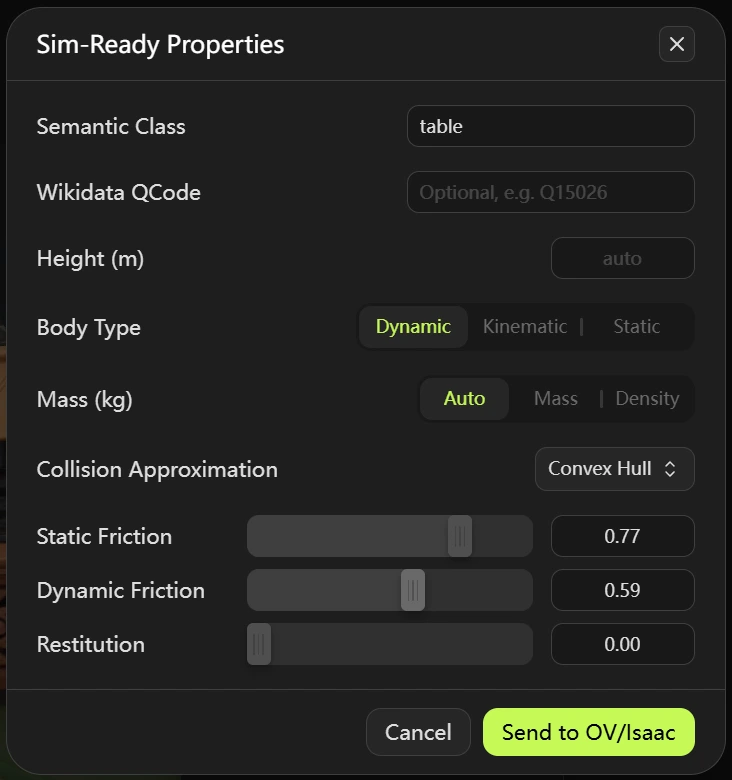
Semantic Class: um rótulo de classe simples, comochair,tableourobot. O bridge o grava por meio de rótulos semânticos modernos e também mantém a compatibilidade LegacySemanticsAPI("class").Wikidata QCode: rótulo opcional de taxonomia semântica, comoQ15026. Vazio é permitido; formatos inválidos são rejeitados antes do envio.Height (m): substituição opcional da altura real. Vazio mantém o dimensionamento da camada de origem e da unidade do estágio.Body Type:dynamic,kinematicoustatic.Mass: o padrão éAuto. Auto não enviamassnemdensity;Massenvia quilogramas;Densityenvia kg/m³.Collision Approximation:convexHull,convexDecomposition,meshSimplification,boundingCube,boundingSphereounone. SDF não é compatível nesta versão. Corpos dinâmicos só permitemconvexHull,convexDecomposition,boundingCubeeboundingSphere.Static Friction,Dynamic FrictioneRestitution: valores de material de física vinculados aos colisores importados.
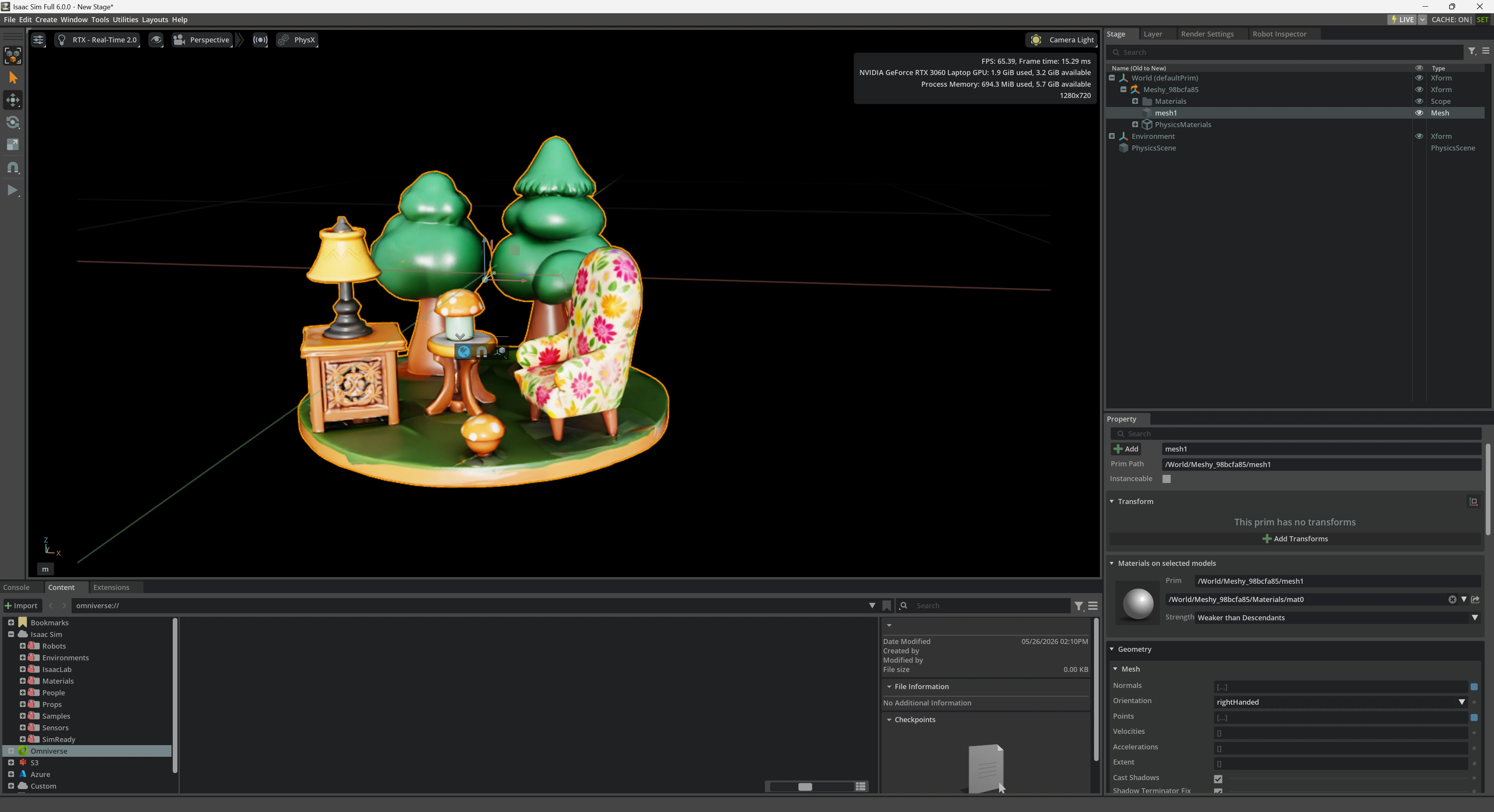
Verificar a importação
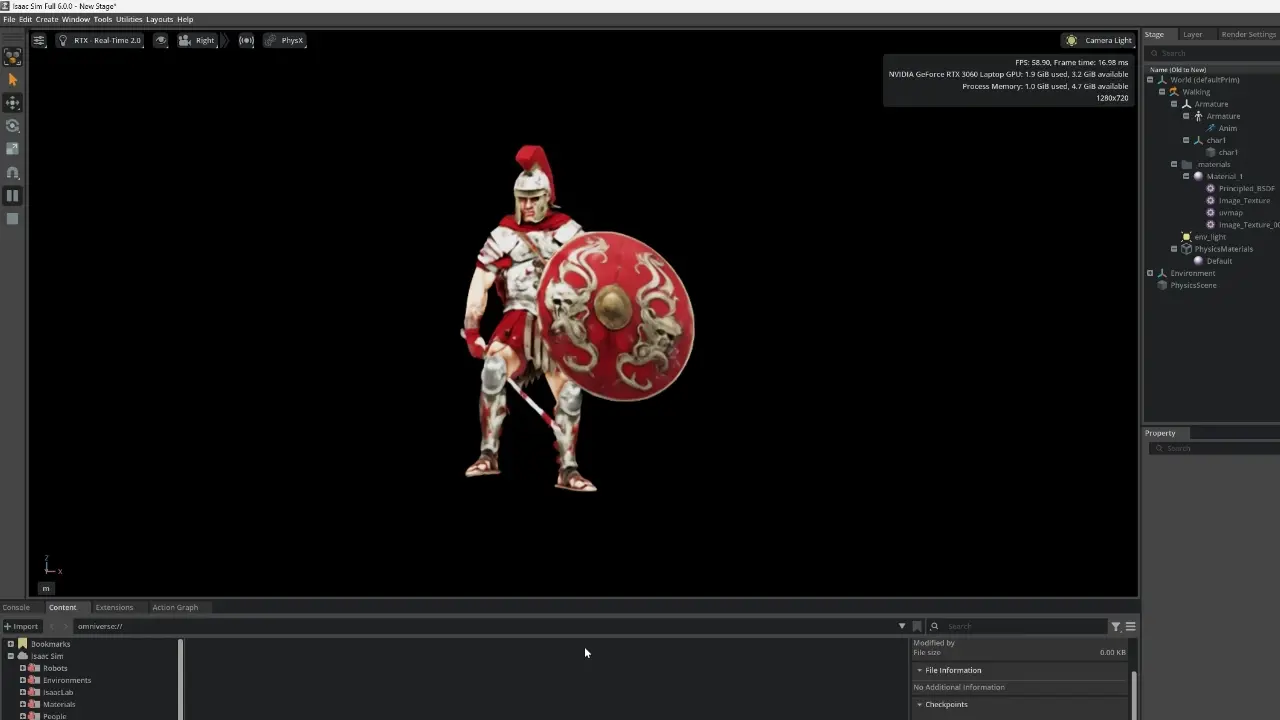
Depois que a solicitação for bem-sucedida, o modelo aparecerá no estágio ativo em /World/<slug>. Para importações Sim-Ready, malhas descendentes recebem UsdPhysics.CollisionAPI e UsdPhysics.MeshCollisionAPI; wrappers dinâmicos e cinemáticos também recebem UsdPhysics.RigidBodyAPI e UsdPhysics.MassAPI.
Pressione Play no Isaac Sim para testar o comportamento da física. Corpos dinâmicos devem ser simulados, corpos estáticos permanecem fixos e corpos cinemáticos podem ser controlados por animação ou script enquanto participam da colisão.
Solução de problemas
- Se o Meshy não conseguir conectar, confirme se o Isaac Sim ou o Kit está em execução e se a extensão está habilitada.
- Se
/statusnão responder, confirme se nenhum outro processo está usando a porta5331e então recarregue a extensão. - Se a importação falhar com
no active USD stage, crie ou abra um estágio antes de enviar. - Se uma importação dinâmica rejeitar
noneoumeshSimplification, escolha uma aproximação convexa ou delimitadora. - Se um QCode for rejeitado, use o formato do Wikidata
Qseguido por um inteiro diferente de zero, por exemploQ15026.
Modelos compatíveis
Enviar para OV/Isaac é compatível com todos os tipos de modelo do Meshy, incluindo modelos animados.