Omniverse / Isaac Sim へのブリッジ
Meshy の 3D モデルを NVIDIA Omniverse または Isaac Sim に直接送信し、インポート時にオプションで Sim-Ready の物理設定とセマンティックラベルを適用します。
Send to OV/Isaac を使用する前に、Isaac Sim または Omniverse Kit アプリを起動したままにし、Meshy ブリッジ拡張機能が有効になっていることを確認し、USD ステージを開くか作成してください。
ブリッジを開始
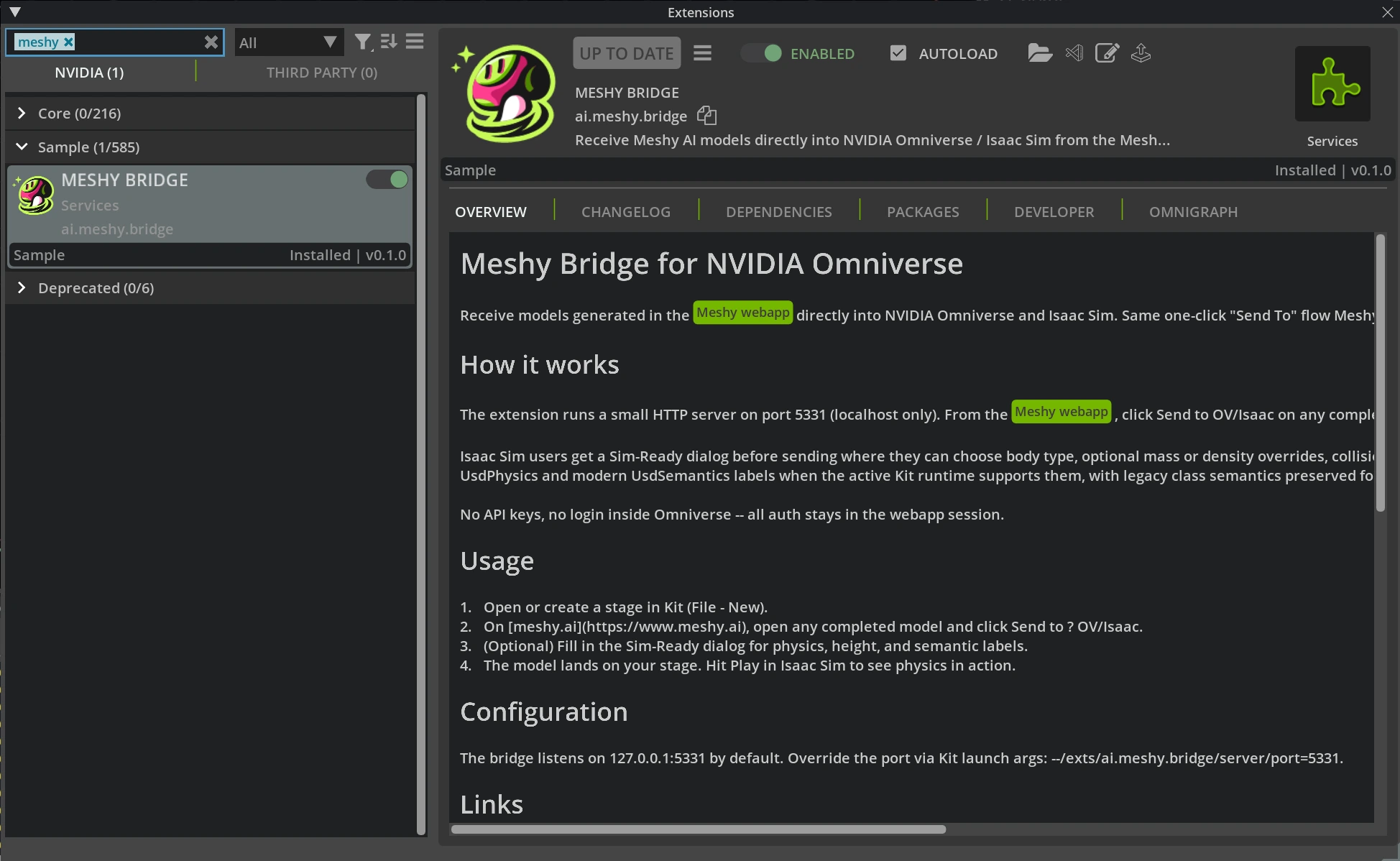
Extensions ウィンドウで、Meshy Bridge が有効になっていることを確認します。別途ランチャーは必要ありません。
Meshy から送信
Meshy ワークスペースで完成済みモデルを開き、DCCブリッジメニューをクリックして、OV/Isaac に送信を選択します。

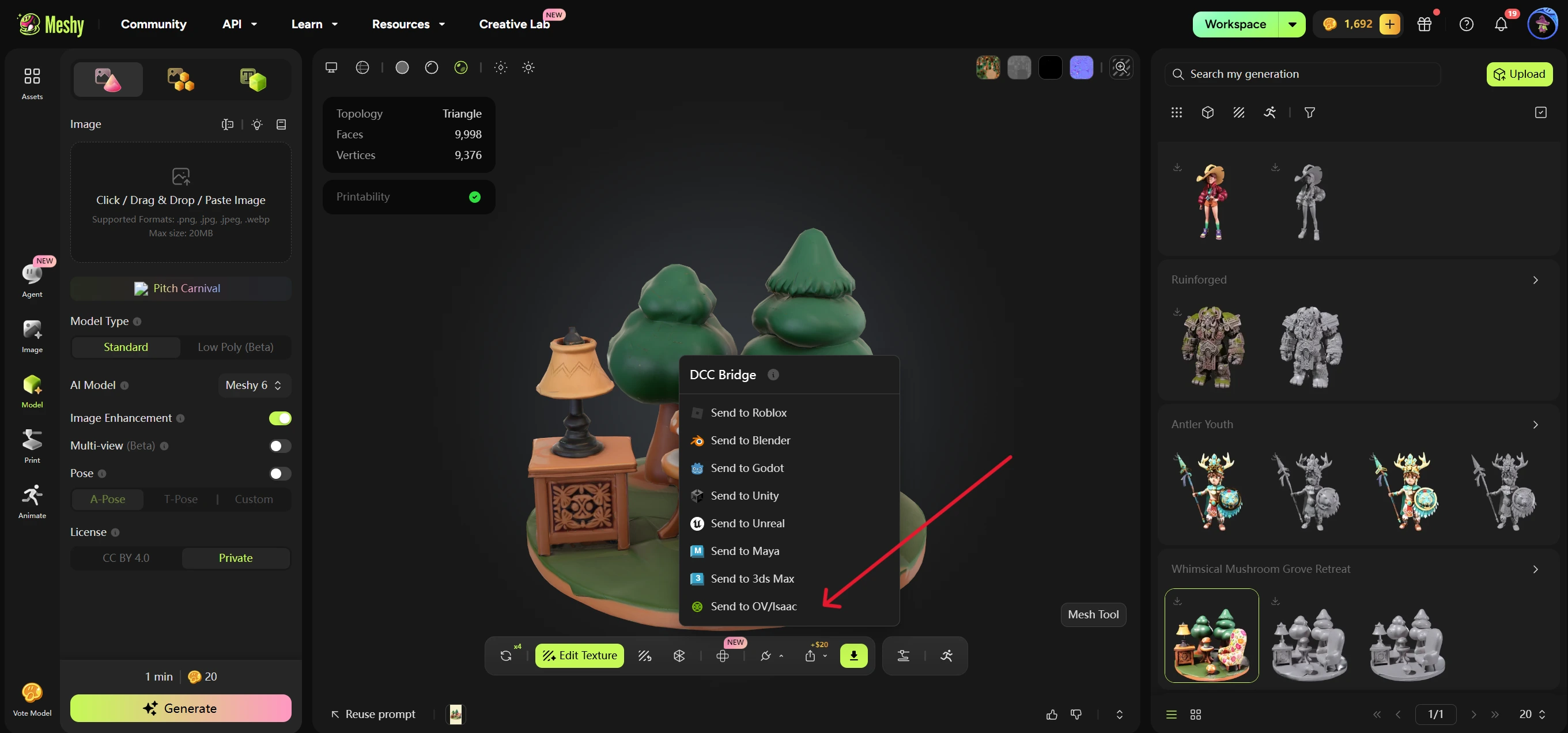
Meshy は、モデル URL、ファイル形式、表示名、およびオプションの Sim-Ready ペイロードをローカルブリッジに送信します。拡張機能はアセットをダウンロードし、必要に応じて USD に変換して、/World/<slug> の下で参照します。
Sim-Ready を設定
Isaac Sim ユーザーは、送信前に Sim-Ready ダイアログを設定できます。
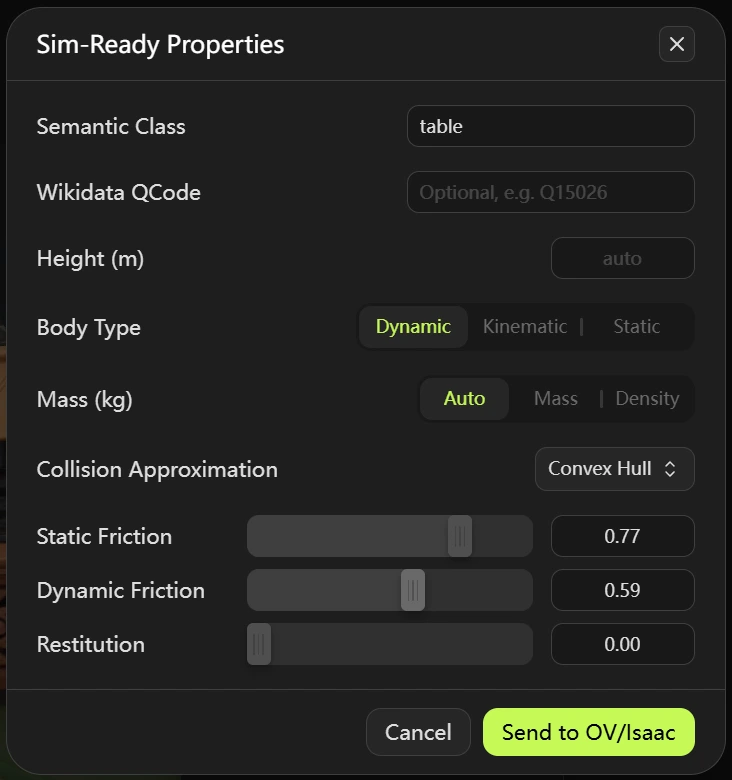
Semantic Class:chair、table、robotなどのシンプルなクラスラベル。ブリッジはこれを最新のセマンティックラベルとして書き込み、Legacy のSemanticsAPI("class")互換性も維持します。Wikidata QCode:Q15026などのオプションのセマンティック分類ラベル。空でも許可されます。無効な形式は送信前に拒否されます。Height (m): オプションの実世界の高さ上書き。空の場合は、ソースレイヤーとステージ単位のスケーリングが維持されます。Body Type:dynamic、kinematic、またはstatic。Mass: 既定値はAutoです。Auto はmassまたはdensityを送信しません。Massはキログラムを送信し、Densityは kg/m³ を送信します。Collision Approximation:convexHull、convexDecomposition、meshSimplification、boundingCube、boundingSphere、またはnone。このリリースでは SDF はサポートされていません。動的ボディではconvexHull、convexDecomposition、boundingCube、boundingSphereのみ使用できます。Static Friction、Dynamic Friction、およびRestitution: インポートされたコライダーにバインドされる物理マテリアル値。
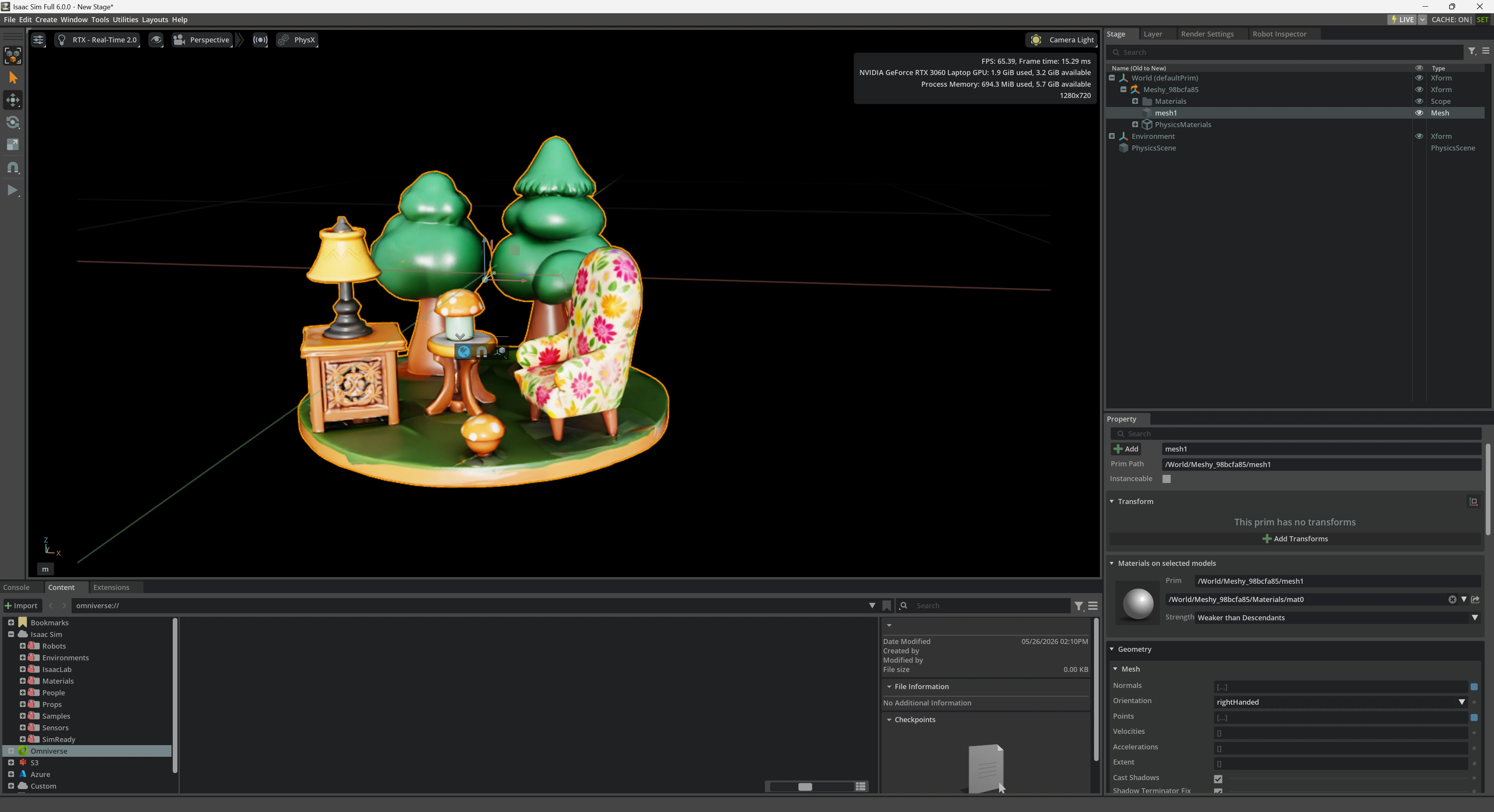
インポートを確認
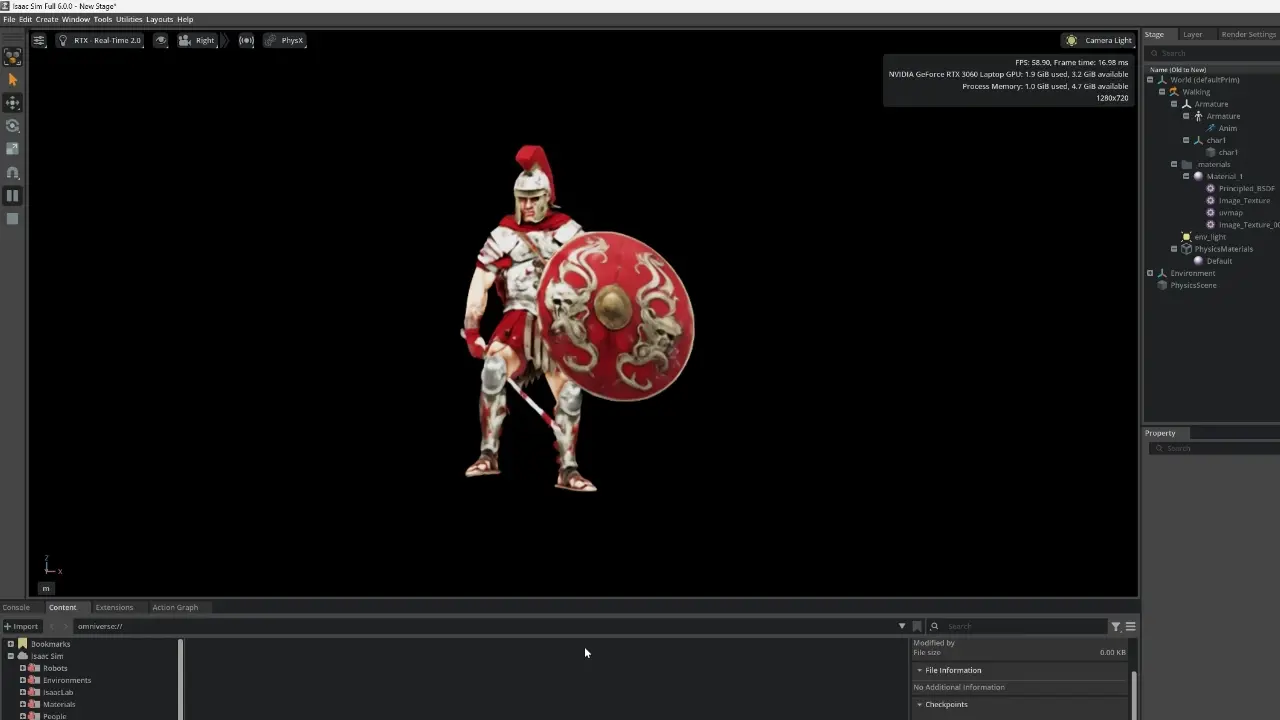
リクエストが成功すると、モデルはアクティブなステージの /World/<slug> の下に表示されます。Sim-Ready インポートの場合、子孫メッシュには UsdPhysics.CollisionAPI と UsdPhysics.MeshCollisionAPI が付与されます。動的およびキネマティックのラッパーには、UsdPhysics.RigidBodyAPI と UsdPhysics.MassAPI も付与されます。
Isaac Sim で Play を押して、物理挙動をテストします。動的ボディはシミュレートされ、静的ボディは固定されたままになり、キネマティックボディは衝突に参加しながらアニメーションまたはスクリプトで駆動できます。
トラブルシューティング
- Meshy が接続できない場合は、Isaac Sim または Kit が実行中で、拡張機能が有効になっていることを確認してください。
/statusが応答しない場合は、他のプロセスがポート5331を使用していないことを確認してから、拡張機能を再読み込みしてください。no active USD stageでインポートに失敗する場合は、送信前にステージを作成または開いてください。- 動的インポートで
noneまたはmeshSimplificationが拒否される場合は、凸形状またはバウンディングの近似を選択してください。 - QCode が拒否される場合は、
Qの後にゼロ以外の整数を続ける Wikidata 形式を使用してください。例:Q15026。
対応モデル
OV/Isaac への送信は、アニメーション付きモデルを含むすべての Meshy モデルタイプに対応しています。