Bridge verso Omniverse / Isaac Sim
Invia i modelli 3D Meshy direttamente in NVIDIA Omniverse o Isaac Sim, con fisica Sim-Ready opzionale ed etichette semantiche applicate durante l'importazione.
Prima di usare Invia a OV/Isaac, mantieni in esecuzione Isaac Sim o la tua app Omniverse Kit, assicurati che l'estensione Meshy Bridge sia abilitata e apri o crea uno stage USD.
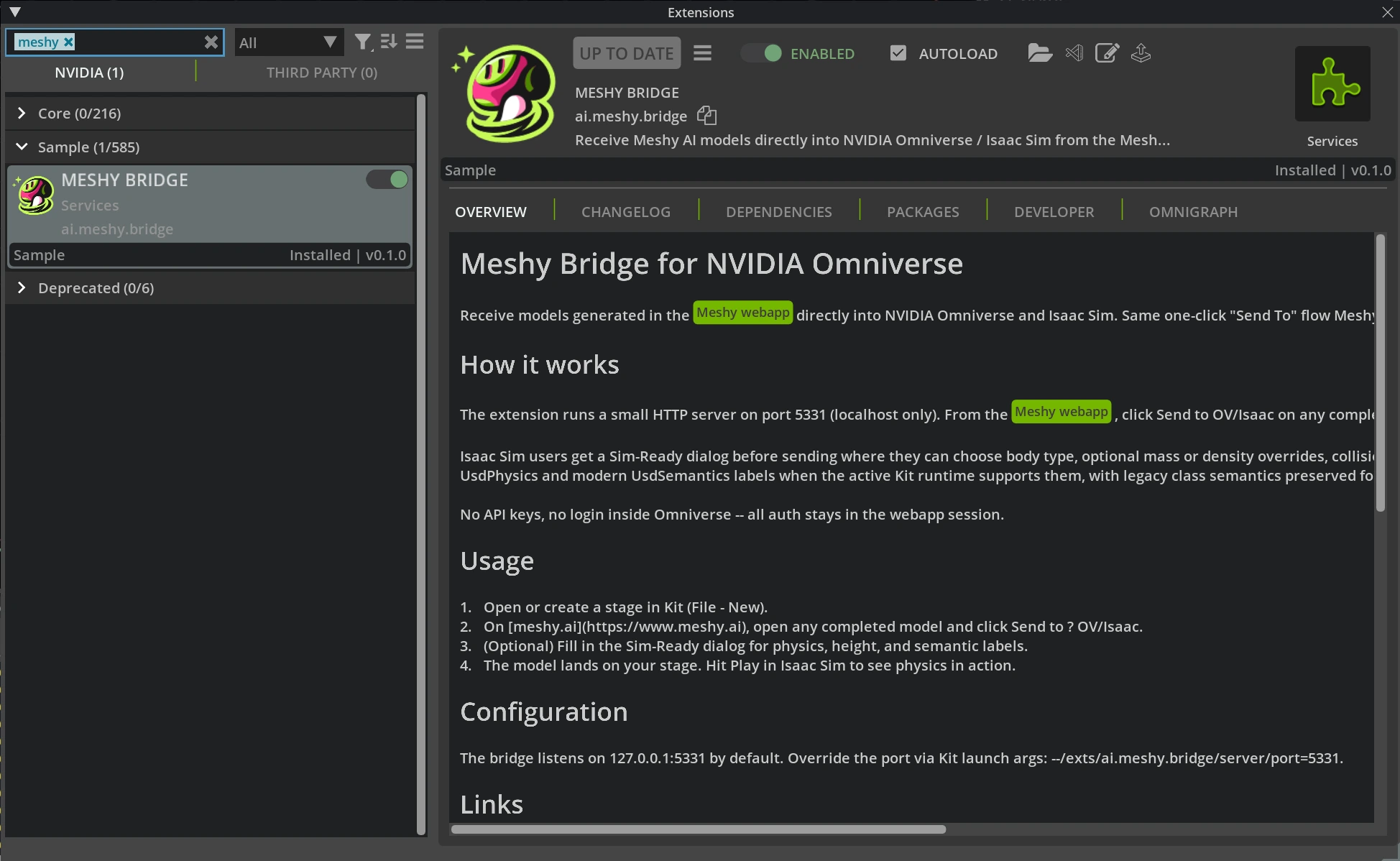
Avvia il Bridge
Nella finestra Extensions, assicurati che Meshy Bridge sia abilitato. Non è necessario alcun launcher separato.
Invia da Meshy
Apri un modello completato nel tuo spazio di lavoro Meshy, fai clic sul menu DCC Bridge e seleziona Invia a OV/Isaac.

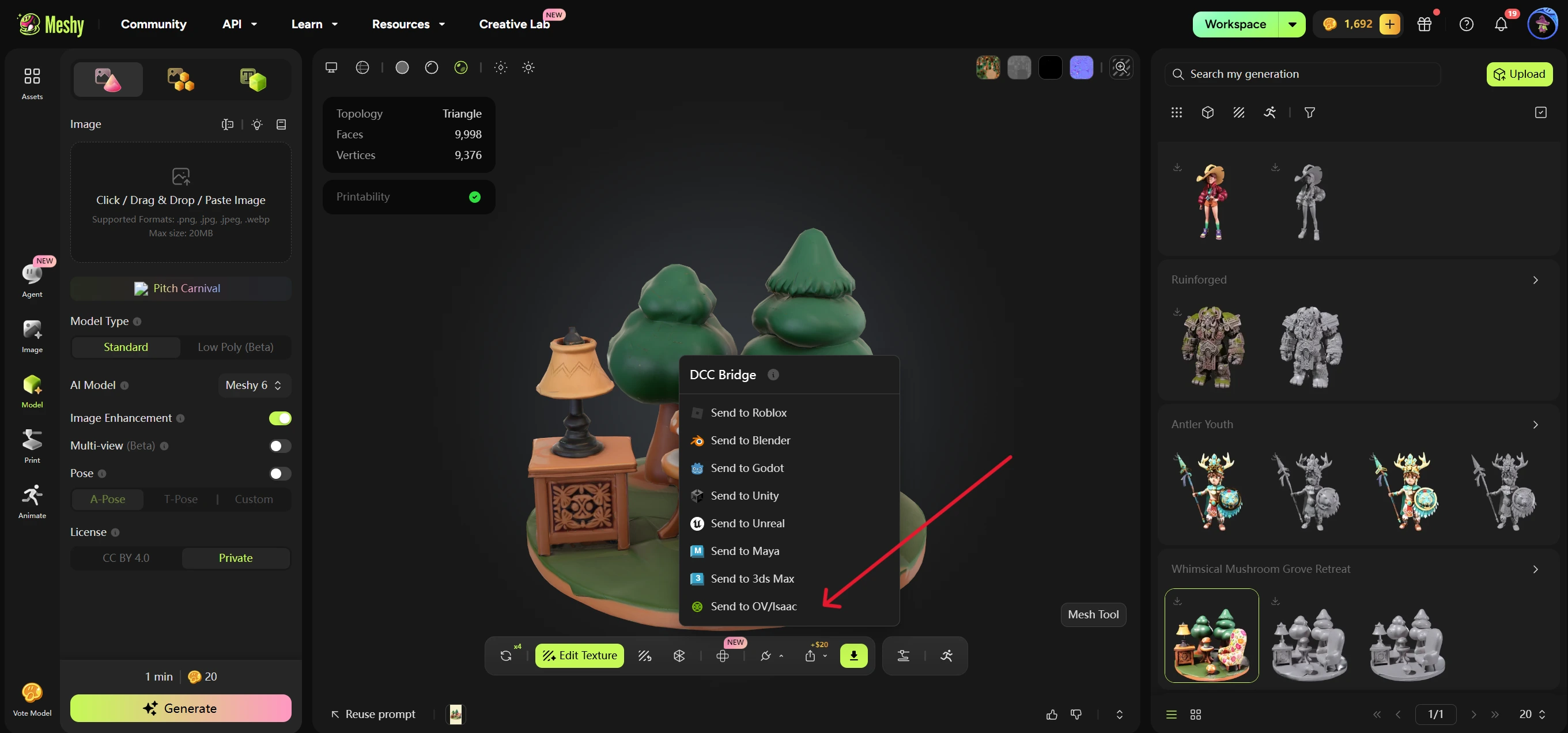
Meshy invia l'URL del modello, il formato del file, il nome visualizzato e il payload Sim-Ready opzionale al bridge locale. L'estensione scarica l'asset, lo converte in USD quando necessario e lo referenzia sotto /World/<slug>.
Configura Sim-Ready
Gli utenti di Isaac Sim possono configurare la finestra di dialogo Sim-Ready prima dell'invio:
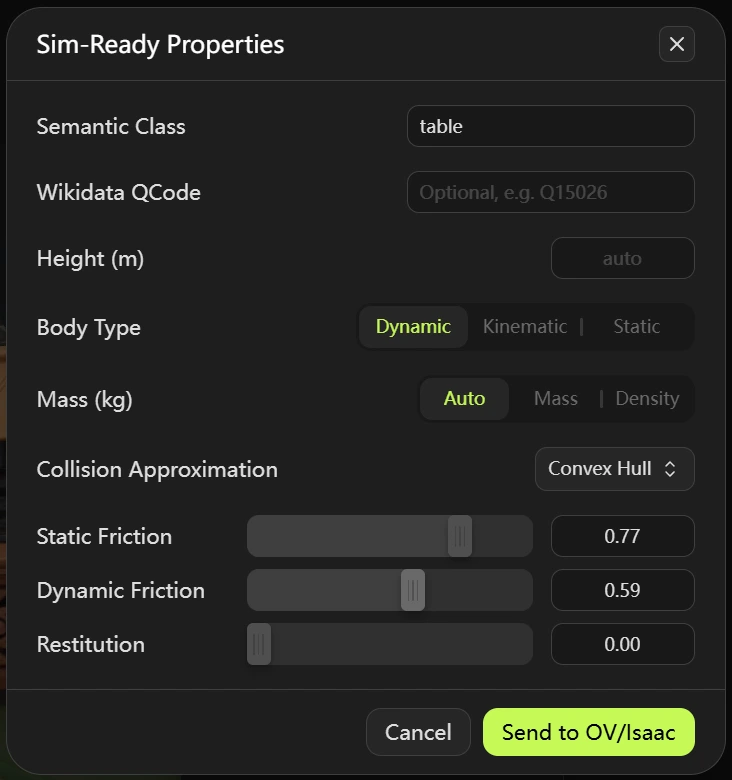
Semantic Class: un'etichetta di classe semplice comechair,tableorobot. Il bridge la scrive tramite etichette semantiche moderne e mantiene anche la compatibilità legacySemanticsAPI("class").Wikidata QCode: etichetta di tassonomia semantica opzionale, comeQ15026. È consentito lasciarla vuota; i formati non validi vengono rifiutati prima dell'invio.Height (m): override opzionale dell'altezza reale. Se vuoto, mantiene il layer sorgente e la scalatura delle unità dello stage.Body Type:dynamic,kinematicostatic.Mass: il valore predefinito èAuto. Auto non inviamassnédensity;Massinvia chilogrammi;Densityinvia kg/m³.Collision Approximation:convexHull,convexDecomposition,meshSimplification,boundingCube,boundingSphereonone. SDF non è supportato in questa release. I corpi dinamici consentono soloconvexHull,convexDecomposition,boundingCubeeboundingSphere.Static Friction,Dynamic FrictioneRestitution: valori del materiale fisico associati ai collider importati.
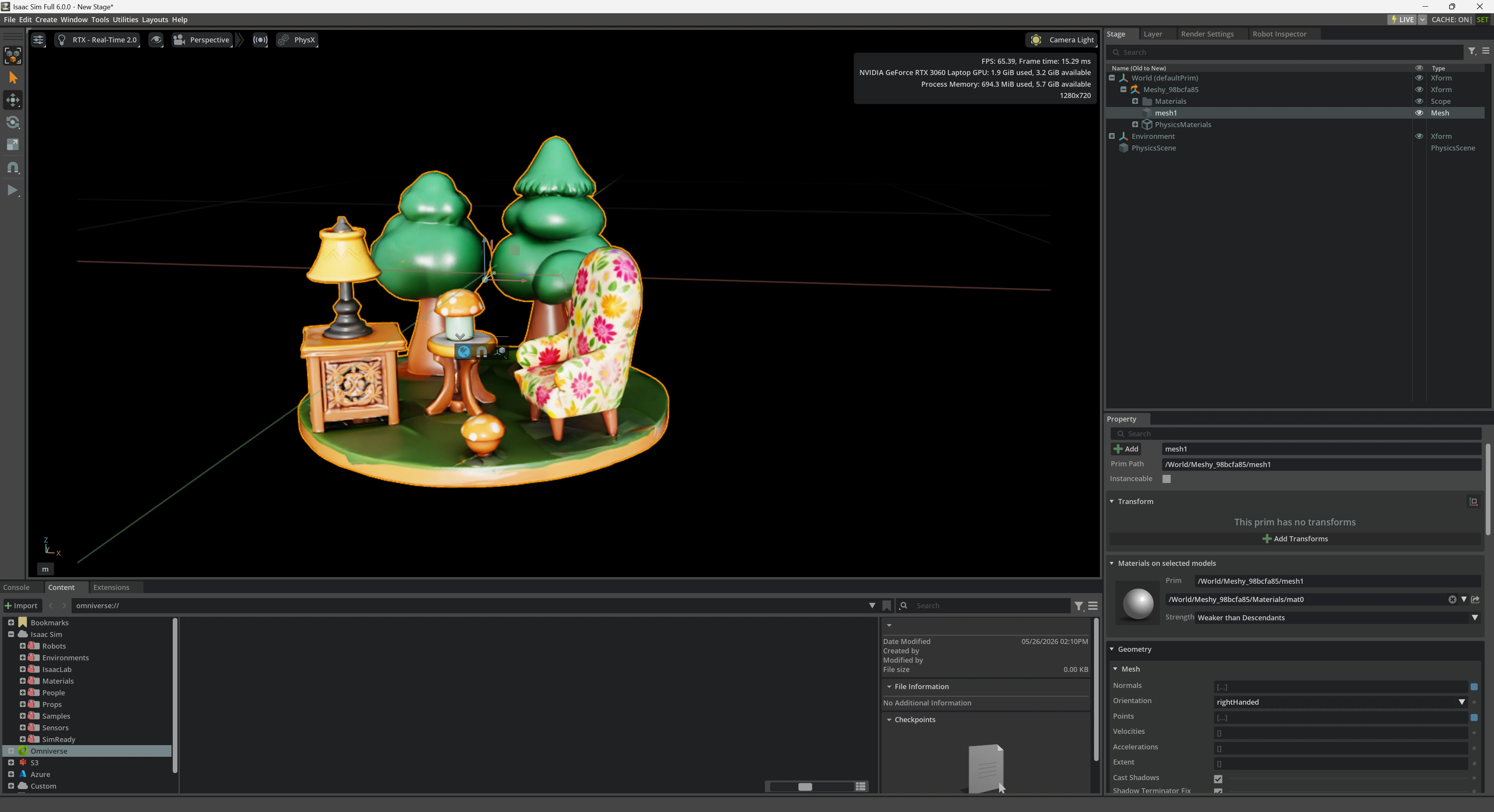
Verifica l'importazione
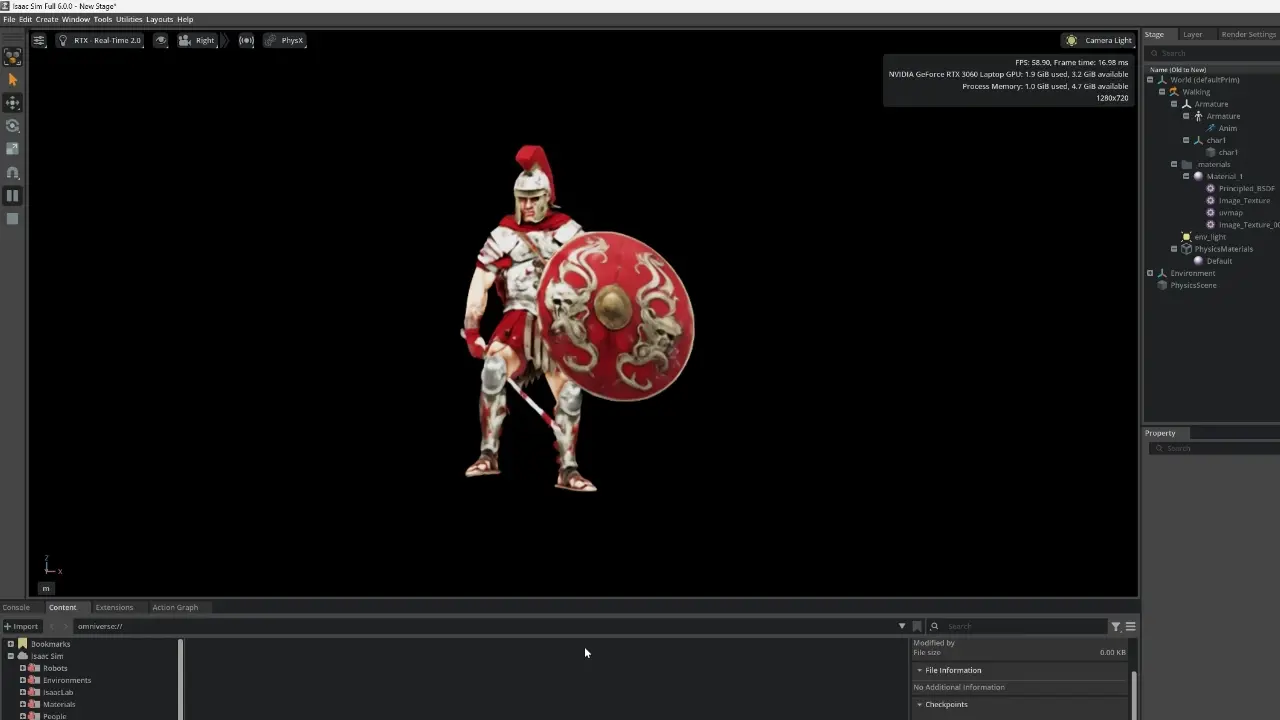
Dopo che la richiesta riesce, il modello appare nello stage attivo sotto /World/<slug>. Per le importazioni Sim-Ready, le mesh discendenti ricevono UsdPhysics.CollisionAPI e UsdPhysics.MeshCollisionAPI; i wrapper dinamici e cinematici ricevono anche UsdPhysics.RigidBodyAPI e UsdPhysics.MassAPI.
Premi Play in Isaac Sim per testare il comportamento fisico. I corpi dinamici dovrebbero essere simulati, i corpi statici rimangono fissi e i corpi cinematici possono essere controllati tramite animazione o script mentre partecipano alla collisione.
Risoluzione dei problemi
- Se Meshy non riesce a connettersi, conferma che Isaac Sim o Kit sia in esecuzione e che l'estensione sia abilitata.
- Se
/statusnon risponde, conferma che nessun altro processo stia usando la porta5331, quindi ricarica l'estensione. - Se l'importazione fallisce con
no active USD stage, crea o apri uno stage prima dell'invio. - Se un'importazione dinamica rifiuta
noneomeshSimplification, scegli un'approssimazione convessa o di delimitazione. - Se un QCode viene rifiutato, usa il formato Wikidata
Qseguito da un intero diverso da zero, ad esempioQ15026.
Modelli supportati
Invia a OV/Isaac supporta tutti i tipi di modelli Meshy, inclusi i modelli animati.