Bridge a Omniverse / Isaac Sim
Envía modelos 3D de Meshy directamente a NVIDIA Omniverse o Isaac Sim, con física Sim-Ready opcional y etiquetas semánticas aplicadas durante la importación.
Antes de usar Enviar a OV/Isaac, mantén Isaac Sim o tu aplicación de Omniverse Kit en ejecución, asegúrate de que la extensión Meshy Bridge esté habilitada y abre o crea un escenario USD.
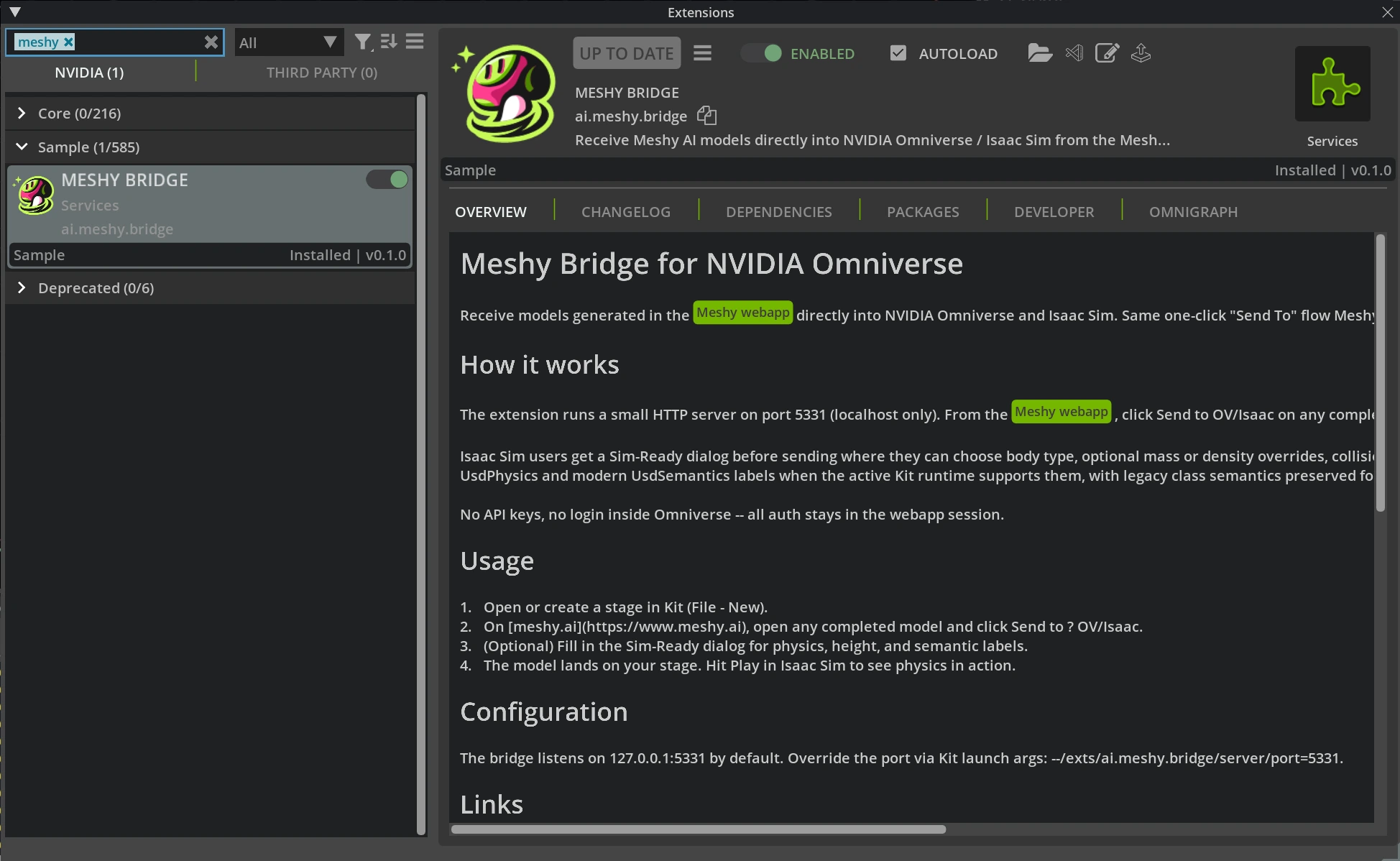
Iniciar el Bridge
En la ventana Extensions, asegúrate de que Meshy Bridge esté habilitado. No se requiere ningún iniciador independiente.
Enviar desde Meshy
Abre un modelo completado en tu espacio de trabajo de Meshy, haz clic en el menú DCC Bridge y selecciona Enviar a OV/Isaac.

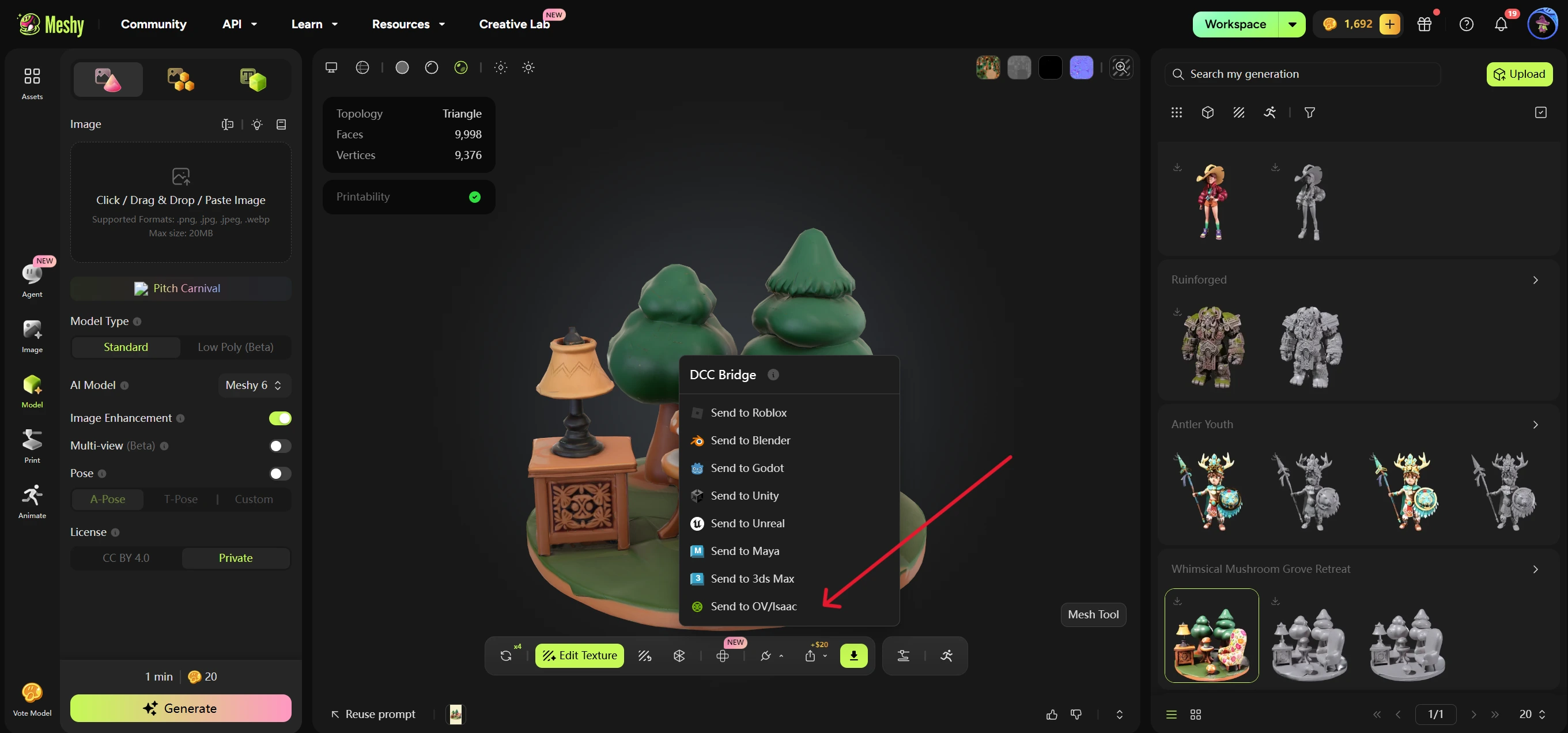
Meshy envía la URL del modelo, el formato de archivo, el nombre para mostrar y el payload Sim-Ready opcional al bridge local. La extensión descarga el asset, lo convierte a USD cuando es necesario y lo referencia bajo /World/<slug>.
Configurar Sim-Ready
Los usuarios de Isaac Sim pueden configurar el diálogo Sim-Ready antes de enviar:
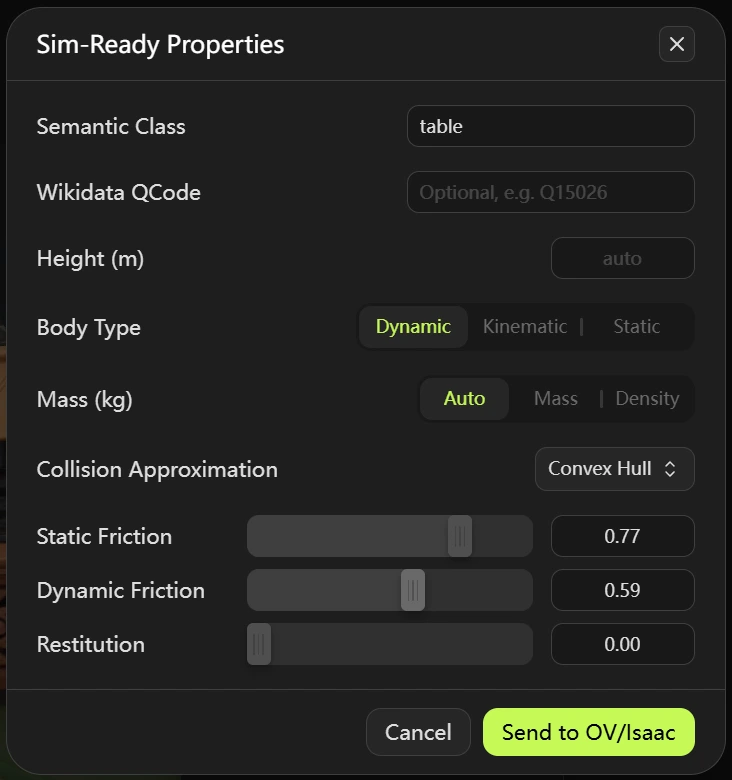
Semantic Class: una etiqueta de clase simple comochair,tableorobot. El bridge la escribe mediante etiquetas semánticas modernas y también mantiene compatibilidad legacy conSemanticsAPI("class").Wikidata QCode: etiqueta de taxonomía semántica opcional, comoQ15026. Se permite dejarla vacía; los formatos no válidos se rechazan antes de enviar.Height (m): anulación opcional de la altura real. Si se deja vacía, se conserva la capa de origen y el escalado de unidades del escenario.Body Type:dynamic,kinematicostatic.Mass: el valor predeterminado esAuto. Auto no envíamassnidensity;Massenvía kilogramos;Densityenvía kg/m³.Collision Approximation:convexHull,convexDecomposition,meshSimplification,boundingCube,boundingSphereonone. SDF no es compatible en esta versión. Los cuerpos dinámicos solo permitenconvexHull,convexDecomposition,boundingCubeyboundingSphere.Static Friction,Dynamic FrictionyRestitution: valores de material de física vinculados a los colisionadores importados.
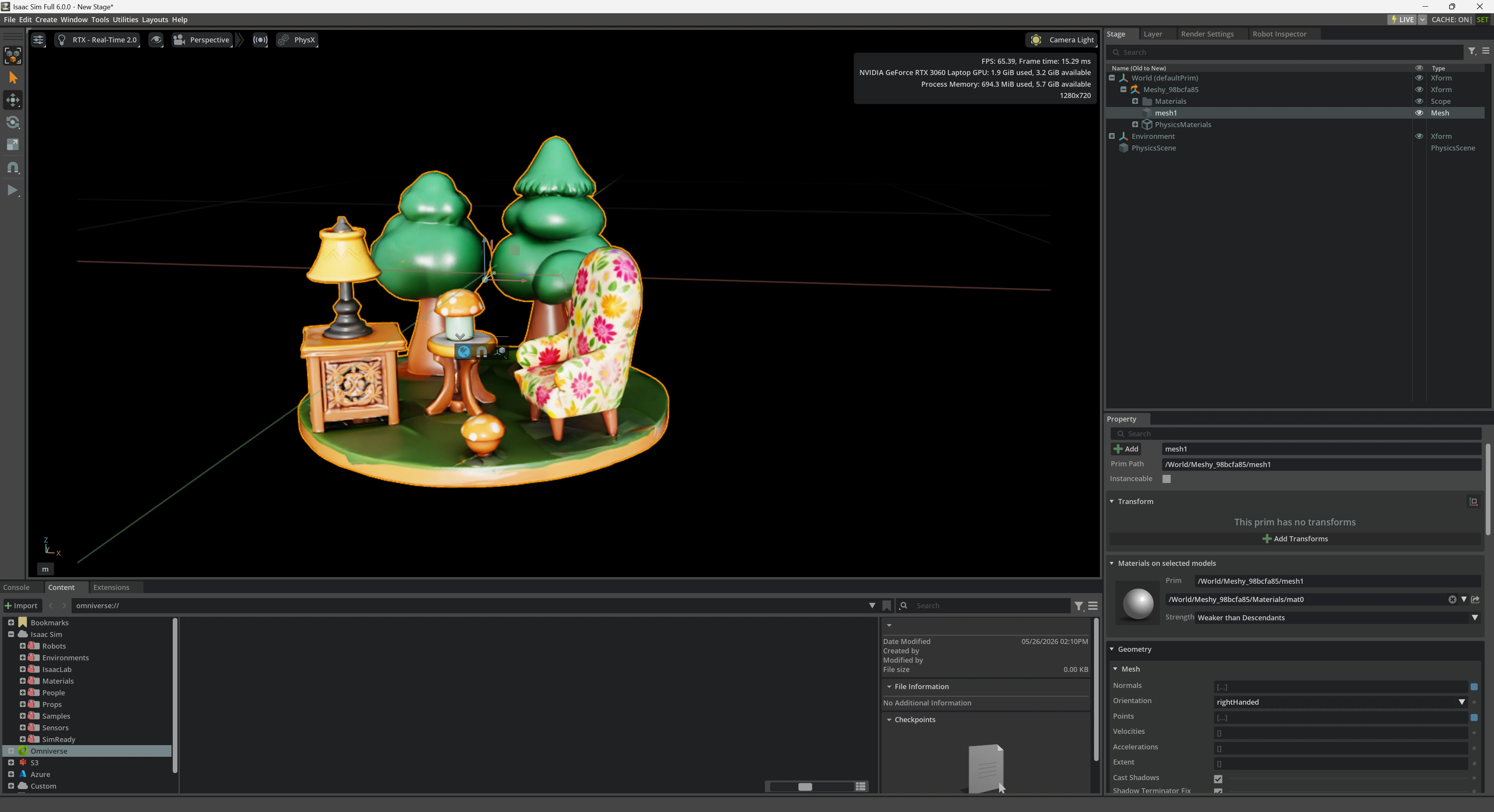
Verificar la importación
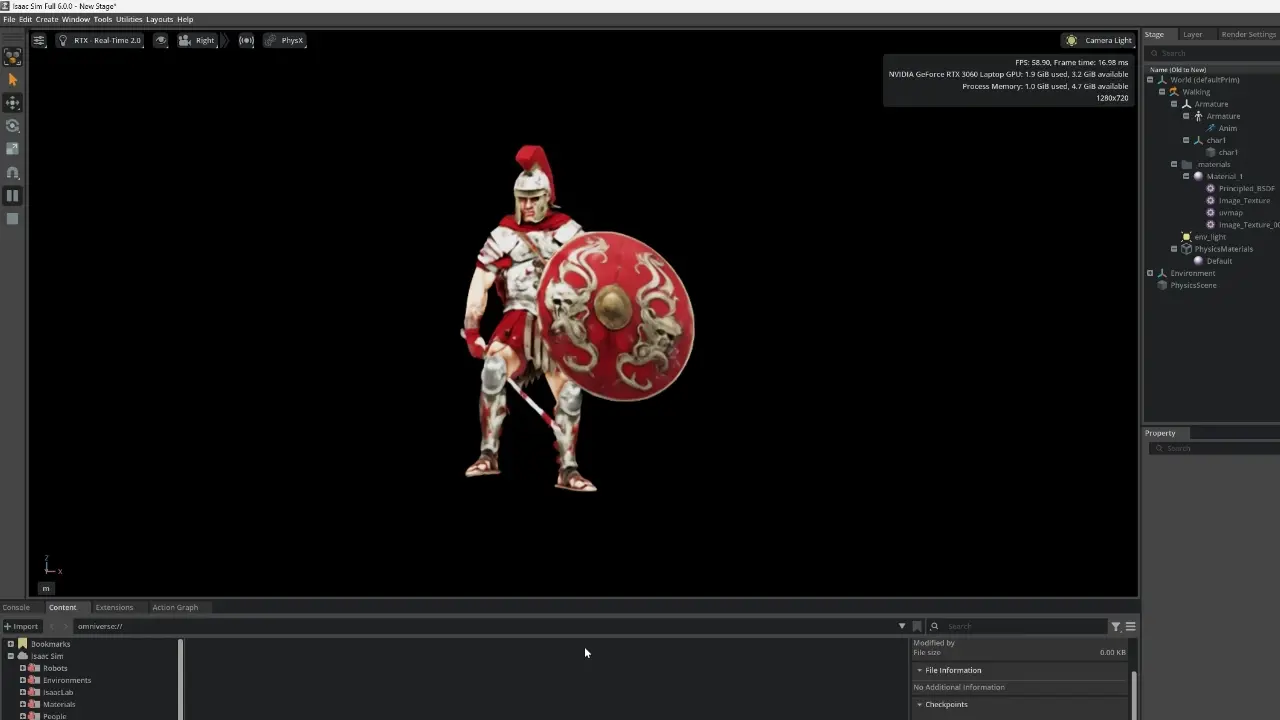
Después de que la solicitud se completa correctamente, el modelo aparece en el escenario activo bajo /World/<slug>. Para las importaciones Sim-Ready, las mallas descendientes reciben UsdPhysics.CollisionAPI y UsdPhysics.MeshCollisionAPI; los contenedores dinámicos y cinemáticos también reciben UsdPhysics.RigidBodyAPI y UsdPhysics.MassAPI.
Pulsa Play en Isaac Sim para probar el comportamiento de la física. Los cuerpos dinámicos deberían simularse, los cuerpos estáticos permanecen fijos y los cuerpos cinemáticos pueden controlarse mediante animación o script mientras participan en la colisión.
Solución de problemas
- Si Meshy no puede conectarse, confirma que Isaac Sim o Kit esté en ejecución y que la extensión esté habilitada.
- Si
/statusno responde, confirma que ningún otro proceso esté usando el puerto5331y luego vuelve a cargar la extensión. - Si la importación falla con
no active USD stage, crea o abre un escenario antes de enviar. - Si una importación dinámica rechaza
noneomeshSimplification, elige una aproximación convexa o envolvente. - Si se rechaza un QCode, usa el formato de Wikidata
Qseguido de un entero distinto de cero, por ejemploQ15026.
Modelos compatibles
Enviar a OV/Isaac admite todos los tipos de modelos de Meshy, incluidos los modelos animados.