Bridge to Omniverse / Isaac Sim
将 Meshy 3D 模型直接发送到 NVIDIA Omniverse 或 Isaac Sim,并可在导入阶段写入 Sim-Ready 物理参数和语义标签。
使用 Send to OV/Isaac 前,请保持 Isaac Sim 或 Omniverse Kit 应用正在运行,确认 Meshy Bridge 扩展已启用,并打开或新建一个 USD stage。
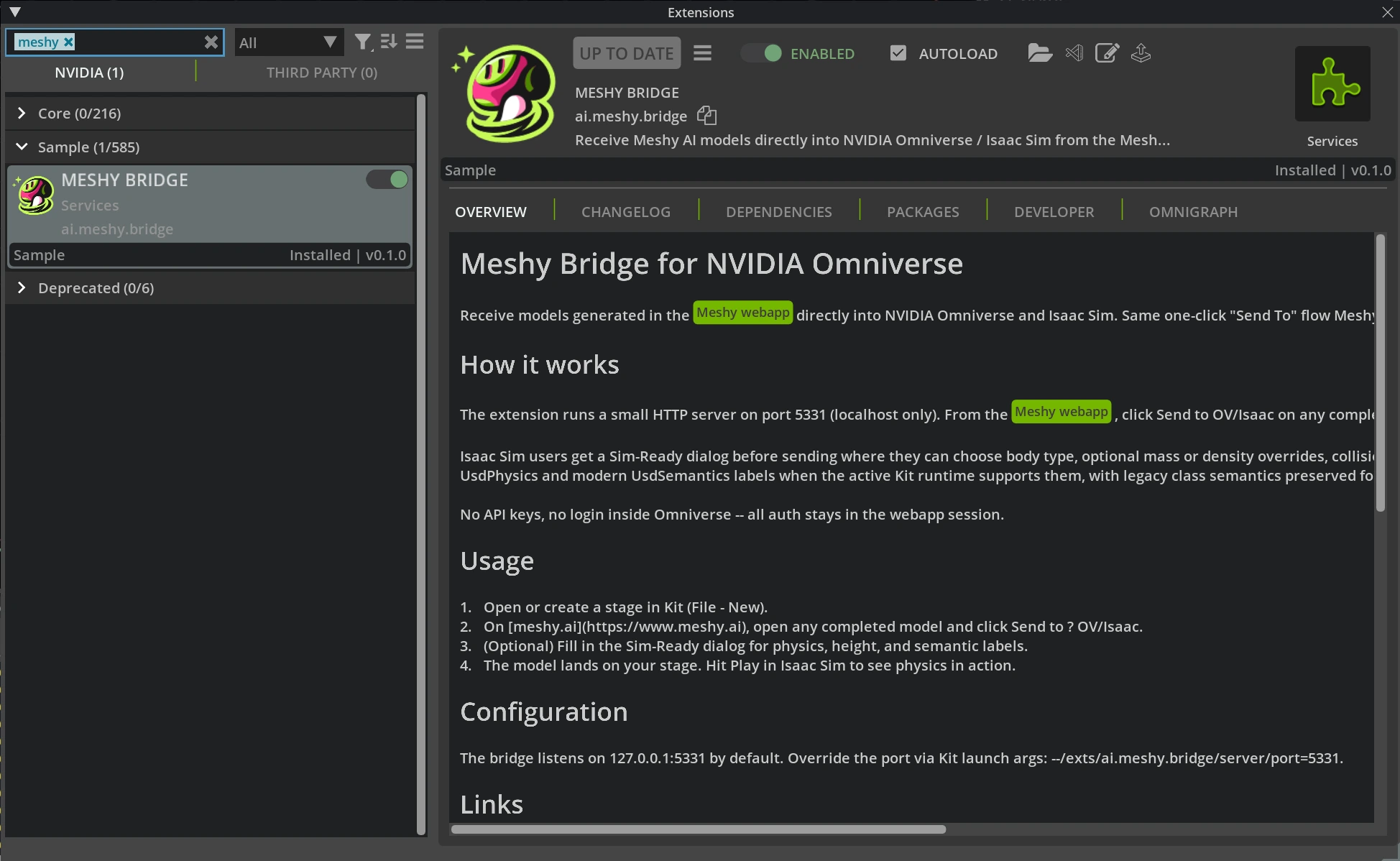
启动 Bridge
在 Extensions 窗口中确认 Meshy Bridge 已启用即可,不需要额外启动单独的程序。
从 Meshy 发送
在 Meshy workspace 中打开已完成的模型,点击 DCC Bridge 菜单,选择 Send to OV/Isaac。

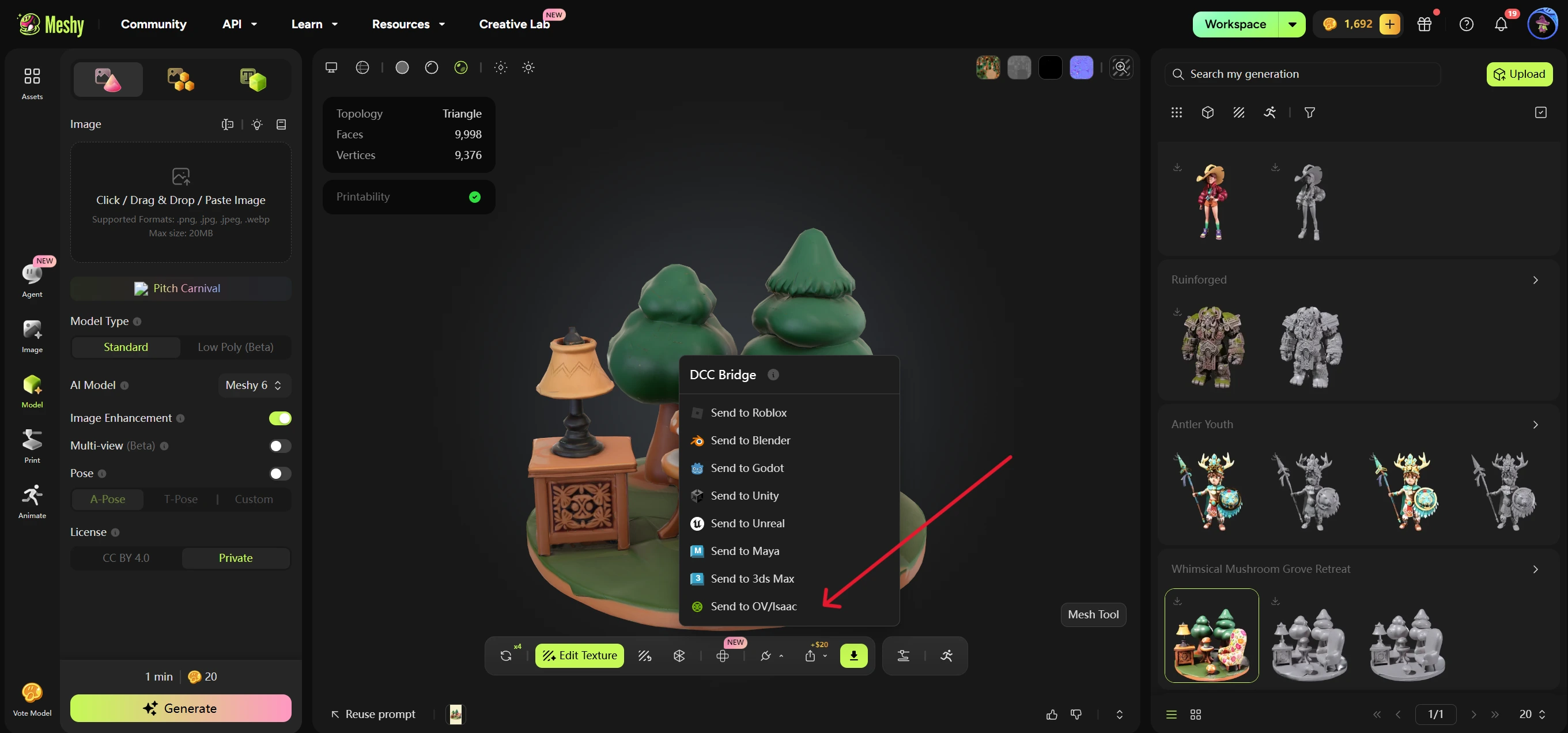
Meshy 会将模型 URL、文件格式、显示名称和可选 Sim-Ready payload 发送给本地 bridge。扩展会下载资产,必要时转换为 USD,并将其 reference 到 /World/<slug>。
配置 Sim-Ready
Isaac Sim 用户可以在发送前配置 Sim-Ready dialog:
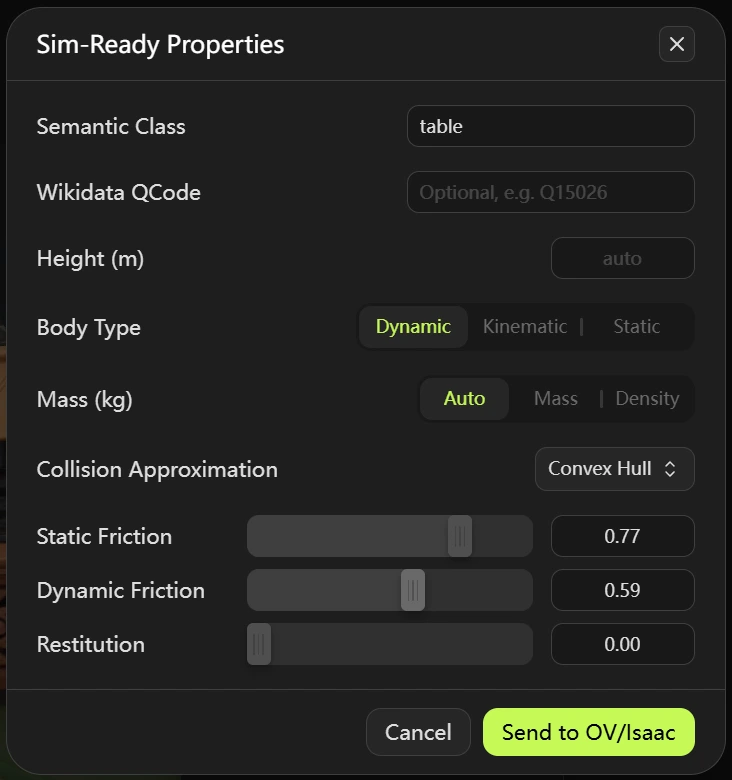
Semantic Class:简单语义类别,例如chair、table或robot。Bridge 会通过新的 semantic labels 写入,同时保留 legacySemanticsAPI("class")兼容。Wikidata QCode:可选的语义 taxonomy label,例如Q15026。可以留空;格式非法时会在发送前被拦截。Height (m):可选的真实世界高度覆盖。留空时保留源 layer 与 stage 的 unit scaling。Body Type:dynamic、kinematic或static。Mass:默认是Auto。Auto 不发送mass或density;Mass发送千克;Density发送 kg/m³。Collision Approximation:convexHull、convexDecomposition、meshSimplification、boundingCube、boundingSphere或none。本版本不支持 SDF。Dynamic body 只允许convexHull、convexDecomposition、boundingCube和boundingSphere。Static Friction、Dynamic Friction和Restitution:绑定到导入 collider 的 physics material 参数。
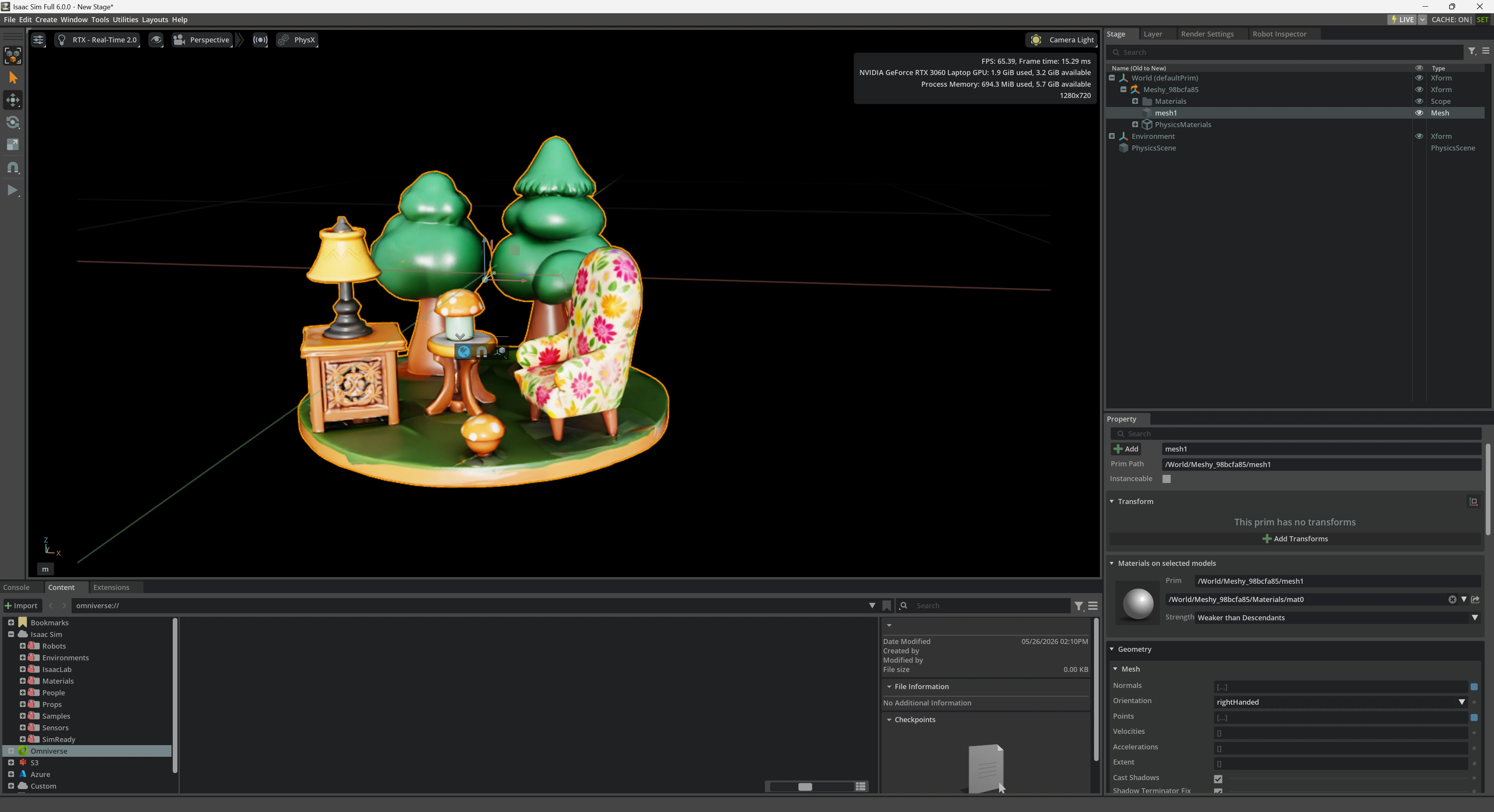
检查导入结果
请求成功后,模型会出现在当前 stage 的 /World/<slug> 下。对于 Sim-Ready 导入,子级 mesh 会写入 UsdPhysics.CollisionAPI 和 UsdPhysics.MeshCollisionAPI;dynamic 与 kinematic wrapper 还会写入 UsdPhysics.RigidBodyAPI 和 UsdPhysics.MassAPI。
在 Isaac Sim 中点击 Play 测试物理行为。Dynamic body 会参与模拟,static body 保持固定,kinematic body 可由动画或脚本驱动并参与碰撞。
故障排查
- 如果 Meshy 无法连接,请确认 Isaac Sim 或 Kit 正在运行,并且扩展已启用。
- 如果
/status没有响应,请确认没有其它进程占用5331端口,然后 reload 扩展。 - 如果导入失败并提示
no active USD stage,请先创建或打开 stage。 - 如果 dynamic 导入拒绝
none或meshSimplification,请选择 convex 或 bounding 类近似。 - 如果 QCode 被拒绝,请使用 Wikidata 格式:
Q加非零开头的整数,例如Q15026。
支持的模型
Send to OV/Isaac 支持任意种类的 Meshy 模型,包括动画模型。